The world of robotics has witnessed remarkable advancements in recent years, with a significant pivot towards soft robotics—a field that prioritizes flexibility and safety in interactions with humans and delicate items. A recent study published in Scientific Reports introduces a groundbreaking approach to designing fabric-based soft pneumatic actuators (FSPAs) using Turing patterns, a concept derived from the legendary mathematician Alan Turing’s morphogenesis theory. This insight not only expands the functionality of FSPAs but also simplifies their design and production, positioning them as an invaluable asset in various applications, including wearable technology, medical devices, and robotic manipulations.
FSPAs excel due to their soft, lightweight nature, allowing them to achieve movements through inflation and deflation effectively. The research team, comprised of experts from Toyota Central R&D Labs in Japan and Toyota Motor Engineering & Manufacturing North America, identified a significant gap in the current methodologies for developing these actuators. Traditional models relied heavily on trial-and-error processes, often hampered by the need for specialized materials and complex technologies. The need for a streamlined and efficient design process resonated with the researchers, motivating them to innovate a more sophisticated method utilizing Turing patterns.
The Theoretical Backbone: Turing Patterns and Morphogenesis
Alan Turing’s seminal work in 1952 focused on understanding how biological patterns emerge in nature, such as stripes on animals and the arrangement of leaves. Turing’s reaction-diffusion theory revolves around two substances that interact in a manner where one enhances the presence of the other, while also inhibiting it. This feedback loop gives rise to diverse yet stable patterns. By leveraging this theoretical foundation, the researchers aimed to replicate Turing’s principles in the physical design of FSPAs.
By conceptualizing Turing patterns into the fabric’s surface texture, the team aspired to create actuators that could achieve varying movements with comparatively simple mechanisms. This innovation is particularly pertinent as soft robotics often depends on actuators that can perform specialized tasks while maintaining adaptability and safety. The research team’s integration of a gradient-based orientation optimization method further allowed for optimizing the alignment of material fibers, making significant strides in the capability to create customized movements within soft robotic frameworks.
One of the research team’s primary goals was to simplify the design and fabrication process of FSPAs. Conventionally, the need for precise geometric features and trial-and-error testing limited the speed and efficiency of actuator development. The team sought to overcome these barriers through advanced automation techniques. By employing gradient-based optimization, they were able to create patterns that dictated how the actuators would behave under applied pressure.
This approach marked a significant departure from previous methods, effectively addressing challenges arising from the isotropic nature of traditional materials. By optimizing the surface membrane of the actuators to incorporate anisotropic properties, the design gained greater functionally and control over its movements. This revolutionary process promises not only to enhance the performance of existing soft robotic applications but also to reduce production costs significantly.
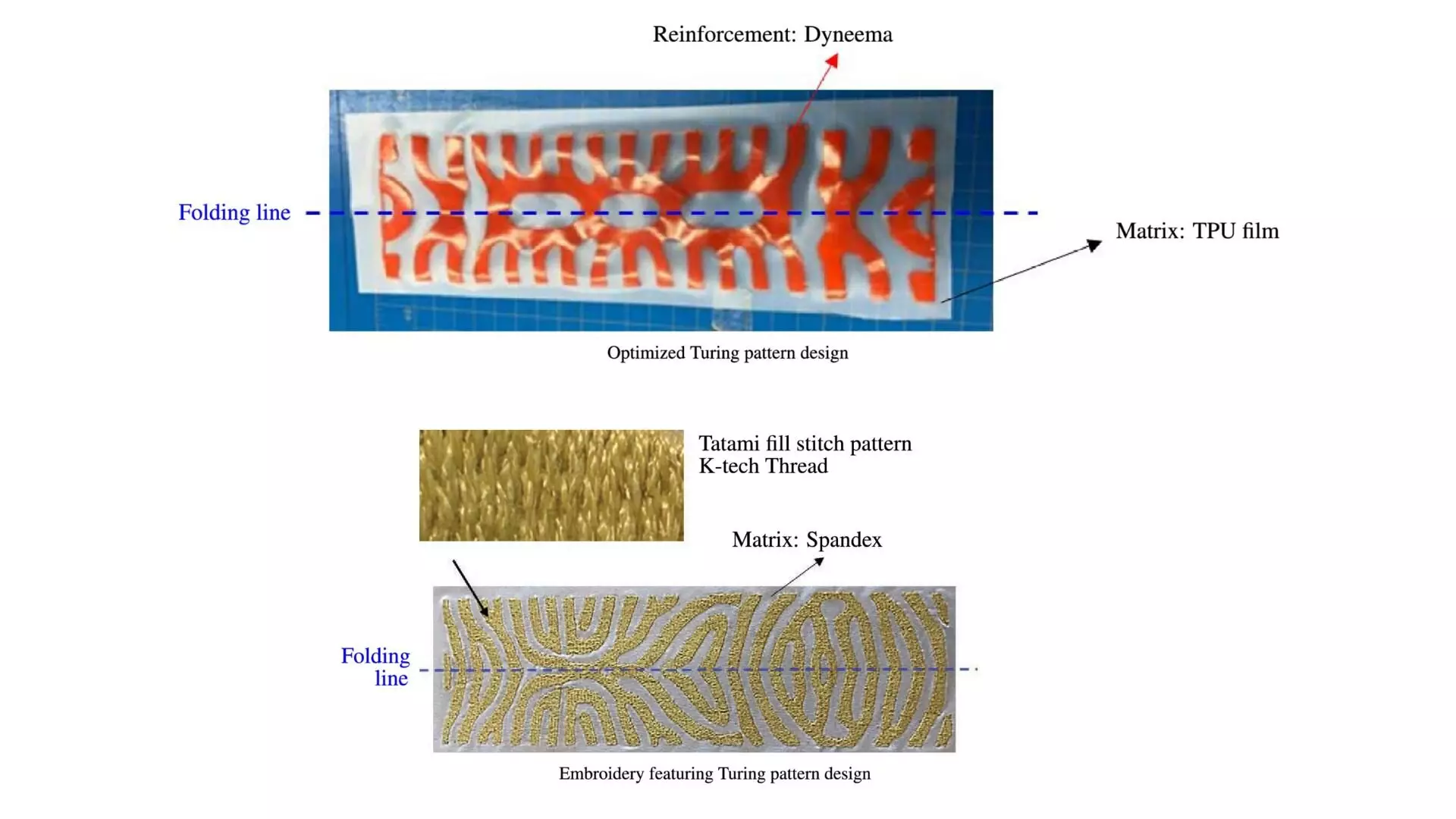
To bring their advanced designs to life, the researchers trialed two innovative fabrication techniques: heat bonding and embroidery. In the heat bonding process, a rigid material is carefully cut into Turing patterns and fused with softer fabrics through heat application. Alternatively, the embroidery method embeds Turing patterns into soft fabric using stiffer threads, thereby creating regions designed for varying stiffness, which enables specialized movement control.
These unique fabrication methods reveal a scalable approach, providing avenues for cost-effective production while retaining functional precision. In analytical comparisons, the Turing pattern designs emerged favorably against their classical counterparts, indicating potential for widespread adaptation in soft robotics.
Looking forward, the implications of this research are nothing short of transformative. The potential integration of Turing patterns with cutting-edge materials such as shape memory alloys or electroactive polymers could yield a new generation of actuators, characterized by enhanced dynamics and responsiveness. Additionally, scaling fabrication techniques through 3D printing and automated weaving systems opens the door to mass production capabilities, catering to an ever-growing market.
As the field of soft robotics continues to evolve, Turing patterns stand to become a pivotal element in cultivating more functional, safe, and adaptable robotic systems. By bridging theoretical insights with practical applications, this research serves as a compelling illustration of how multidisciplinary approaches can drive innovation in the technological landscape. The future beckons for the robotics community, and the possibilities are as vast as they are promising.