Navigating a physical environment is a task that humans perform effortlessly, yet it represents a significant challenge for robots. When we reach for a book on a shelf or maneuver around furniture, our brains execute a series of intricate calculations and adjustments in real-time, all while avoiding obstacles. This innate ability stands in stark contrast to the traditional methods employed in robotics, where a machine struggles to replicate such natural movement. The complexity of motion planning—essentially the algorithmic equivalent of human perception and action—often leads to inefficiencies that drag down robotic performance in dynamic settings. Understanding these limitations is crucial for researchers who aim to develop more responsive robotics systems capable of operating in unfamiliar environments.
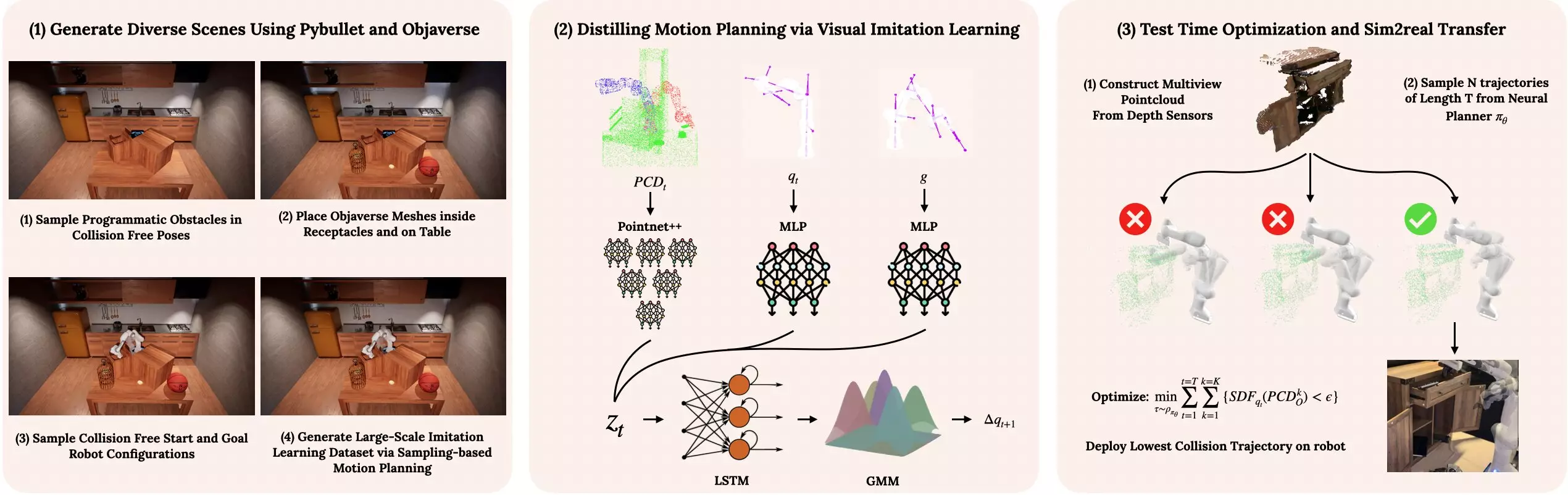
Carnegie Mellon University’s Robotics Institute (RI) has introduced a pioneering approach to surprisingly enhance the adaptability of robots in novel scenarios—Neural Motion Planning. Drawing inspiration from human development and learning mechanisms, the researchers designed a data-driven framework that enables robots to manage motion planning more effectively. Unlike traditional motion planning strategies, which often require exhaustive collision avoidance checks and extensive computational resources, Neural Motion Planning leverages the power of artificial intelligence to streamline this process. The algorithm processes diverse data inputs derived from simulations, training the robot in an array of household environments without preconceived notions about obstacles it might face.
In both physical and simulated environments, the inspiration for this innovative approach mirrors how humans refine their skills. Initially, we engage in activities slowly and cautiously, gradually mastering them through practice. Neural Motion Planning encapsulates this idea, utilizing vast datasets to enable robots to not only learn from repetition but also to enhance their reactive capabilities as they encounter new, unstructured spaces.
Implementing this advanced motion planning system involves immersing robots in simulations that replicate realistic household situations. By exposing robots to diverse environments—including microwaves, shelves, and unexpected obstacles like pets or decorations—researchers contribute a wealth of experiential data to the training model. The result? Robots equipped with a generalized skill set that adapts to the unpredictable nature of human-centered spaces.
The undeniable advantages of Neural Motion Planning extend beyond mere adaptability. The methodology achieves a remarkable level of efficiency by reducing the time robots need to perform collision checks—an essential component of any motion planning algorithm. According to Murtaza Dalal, a prominent doctoral student at RI, conventional methods often crumble in the face of complexity, which Neural Motion Planning effectively bypasses. By synthesizing numerous simulations into a streamlined model, the robotic system demonstrates agility and dexterity unforeseen in earlier generations of technology.
Proving its efficacy, the Neural Motion Planning model has undergone rigorous testing via robotic arms in laboratory settings. Upon receiving a three-dimensional map of the scenario from depth sensors, these arms were able to traverse unfamiliar surrounds, successfully avoiding various obstacles, such as plants, lamps, and cabinet doors. The results not only exemplify the model’s capacity to integrate acquired knowledge but also reveal potential pathways for future advancements in robotics.
According to Jiahui Yang, a master’s student at RI, the excitement generated by witnessing a single model navigate through diverse challenges is indicative of a larger paradigm shift on the horizon. As researchers like Deepak Pathak note, while fields such as vision and language processing—think of AI applications like ChatGPT—have made tremendous strides, robotics had yet to catch up until now. Neural Motion Planning exemplifies a critical advance toward achieving the same level of robust learning within robotics, demonstrating substantial promise for the future of intelligent machines.
As robotics continues to evolve, the implications of Neural Motion Planning cannot be understated. The research conducted by Carnegie Mellon University stands as a beacon of hope for the integration of smarter, more adaptable robots into everyday life. Whether it’s assisting in household chores or performing complex surgical operations, the refined conveyor of knowledge seen in this approach offers powerful insights into how machines might not only learn but also thrive in human environments.
The journey toward creating robots that seamlessly integrate into our lives is ongoing, but advancements like Neural Motion Planning showcase our capability to bridge the gap between human intuition and robotic precision, just as we have done throughout history with other forms of technology. The future, therefore, is not just innovative—it is also filled with potential.