The integration of robotics into various industries has reached an unprecedented level, with the automotive sector leading the way. However, the rapid advancement of technology has opened doors to new applications, particularly in logistics. Despite these advancements, current robotic systems remain constrained by their inability to perform a wide array of tasks dynamically. Often, they execute predetermined actions repetitively, lacking the adaptive finesse that characterizes human interaction. The goal of modern robotics is to transcend these limitations by imbuing machines with capabilities that mirror human dexterity and adaptability.
Recent developments in robotics research emphasize the necessity for machines to refine their physical interaction with their environment. High-contact scenarios—such as moving heavy luggage at airports or navigating hazardous industrial settings—demand robust and rapid responses that traditional robots are ill-equipped to handle. The urgency for improved robotic systems is evident; tasks that require judgment, spatial awareness, and quick adaptability are still challenging for robots. The I.AM project, spearheaded by researchers at Eindhoven University of Technology, fundamentally aimed to revolutionize how robots perceive and operate within their surroundings.
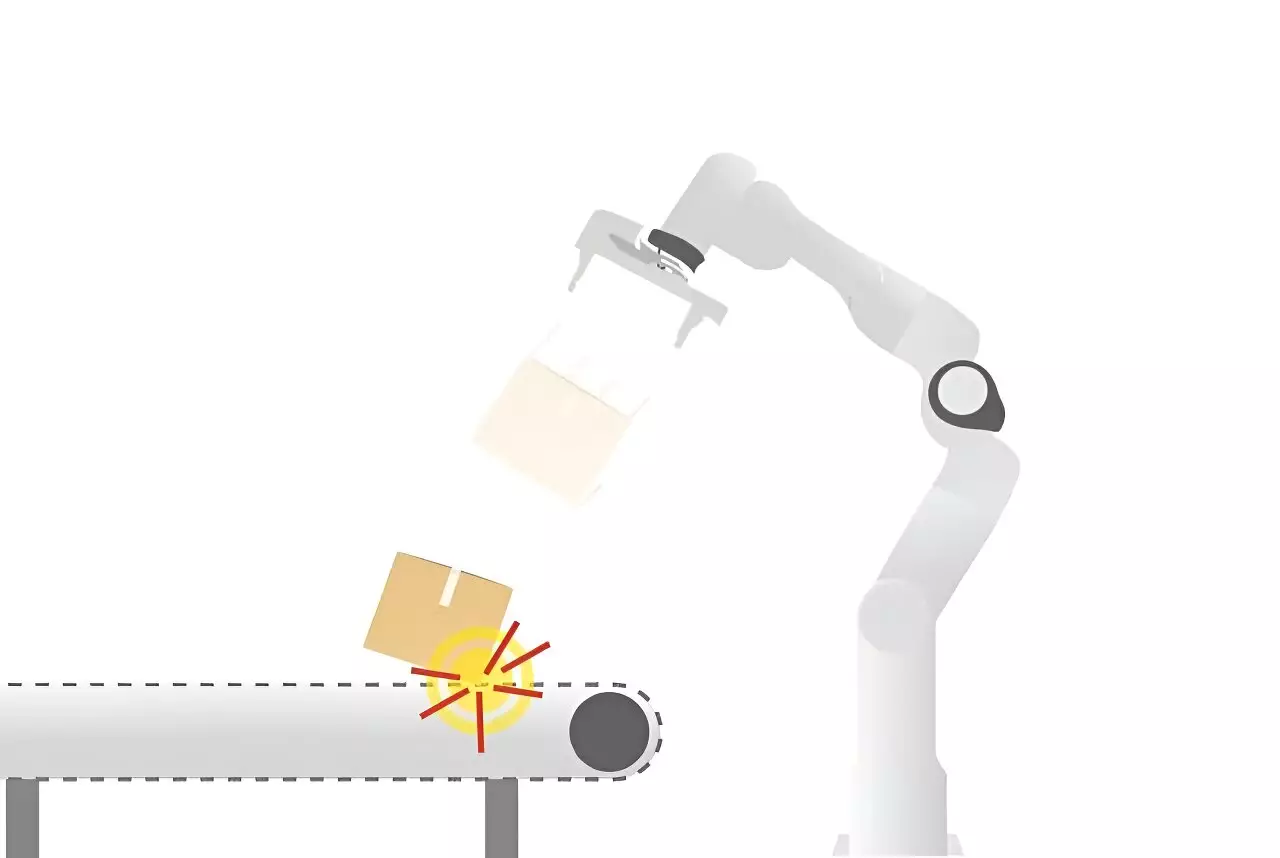
A significant shift in the approach to robotics comes from rethinking the conventional paradigm of collision avoidance—an aspect that has dominated robotic research. Instead of merely dodging obstacles, the I.AM project focused on collision exploitation, where robots learn to anticipate and utilize physical interactions with their environment. This innovative perspective tackled the challenge of heavy object manipulation. Robots needed to not only grasp items effectively but also adapt to real-time variations, such as unexpected weight and position discrepancies. The complexities involved in making robotic movements resilient against such uncertainties became a focal point of the research.
To address these dynamic interactions, researchers employed fundamental principles of physics, including considerations of mass and friction. By marrying theoretical frameworks with software simulations, they aimed to capture the robust dynamics of real-world interactions. Iterative cycles of development allowed researchers to refine control algorithms, enabling robots to improve their precision and speed when handling substantial objects. This sophisticated process underscored the importance of real-time data collection, further enhancing the learning capabilities of robots through experience and environmental feedback.
One intriguing aspect of the research is the stark contrast between robotic capabilities and human movement comprehension. Humans seamlessly navigate complex environments and perform intricate tasks with little conscious thought. This innate ability poses a significant challenge for robotics researchers, who strive to decode and replicate such fluidity in machines. The scientists involved in the project are not merely tinkering with hardware but are delving deeply into spatial awareness, planning, and real-time environmental analysis—components essential for creating robots that can “think” and adapt on their feet.
The partnership with VanderLande, a key player in logistics automation, provided invaluable insights into real-world challenges and driving forces behind effective robotic solutions. Such collaborations have facilitated hands-on experimentation, fostering an environment conducive to innovation and pragmatic problem-solving. The exploratory nature of the research has yielded promising results, including improved gripper models that enhance motion control, signaling a positive trend toward bridging the gap between theoretical research and practical applications.
The Netherlands has long been a crucible of innovation in the field of robotics, making noteworthy contributions to areas such as medical robotics and mobile robotics. The impact-aware robotics research is gaining traction, garnering both national and international interest. The visibility from the I.AM project not only amplifies the call for further exploration in this field but also highlights the potential for future funding endeavors aimed at addressing lingering challenges—particularly in fast planning and enhanced perception.
As the field of robotics continues to evolve, the journey embarked upon by projects like I.AM serves as a cornerstone for future innovations. The collaborative spirit, combined with a relentless pursuit of knowledge, paves the way for robots that can truly augment human capabilities across various sectors. While challenges abound, the excitement of unearthing new possibilities keeps researchers motivated—ensuring that the future of robotics will not only be about automation but also about partnership with human ingenuity. The path ahead is filled with opportunities to redefine what machines can achieve, ultimately fostering a world where human-robot collaboration becomes a commonplace reality.